Un piloto automático náutico es un sistema de gobierno que mantiene el rumbo de un barco sin intervención de una persona. Es el automatismo que, actuando sobre el timón mediante un motor y siguiendo la información que recibe de compases y otros sensores, mantiene un rumbo prefijado o sigue rutas marcadas en un GPS. Es el mecanismo que libera al patrón del estrés y la fatiga de tener que gobernar durante horas haciendo las largas travesías más relajadas. el piloto automático permite afrontar navegaciones en solitario o de guardia larga sin agotar al tripulante. Es el artefacto perfecto para travesías oceánicas o noches de ceñida.
No conozco a nadie que navegue habitualmente y no disponga de un piloto automático a bordo de su embarcación. Suelen ser dispositivos entre caros y carísimos que pueden llegar a consumir mucha batería y son un prodigio de tecnología que tuvo un desarrollo velocísimo e impresionante a lo largo del siglo XX. Para entender tras estos aparatos que se han convertido en algo tan cotidiano, primero hay que remontarse a los sistemas manuales de gobierno, entender cómo un dispositivo de laboratorio dio la clave física para contrarrestar el balanceo y el cabeceo de los buques y para tener una indicación de rumbo fiable. Sin giroscopios ni girocompases, no habría referencia ni estabilidad para llegar a crear el primer piloto automático.
La evolución sistemas de gobierno
El largo viaje hasta el desarrollo de un piloto automático está íntimamente ligado a la historia y evolución de los sistemas de gobierno y estos, a su vez, lo están a la eslora y el desplazamiento del buque. Hasta el siglo XV el sistema de gobierno más frecuente consistía en una pala larga situada a estribor, manejada directamente por el patrón de la embarcación. Un sistema sencillo, que requería mucho esfuerzo y limitaba la eslora del barco y resultaba inútil con viento de través, pues tenía la tendencia a quedar fuera del agua.
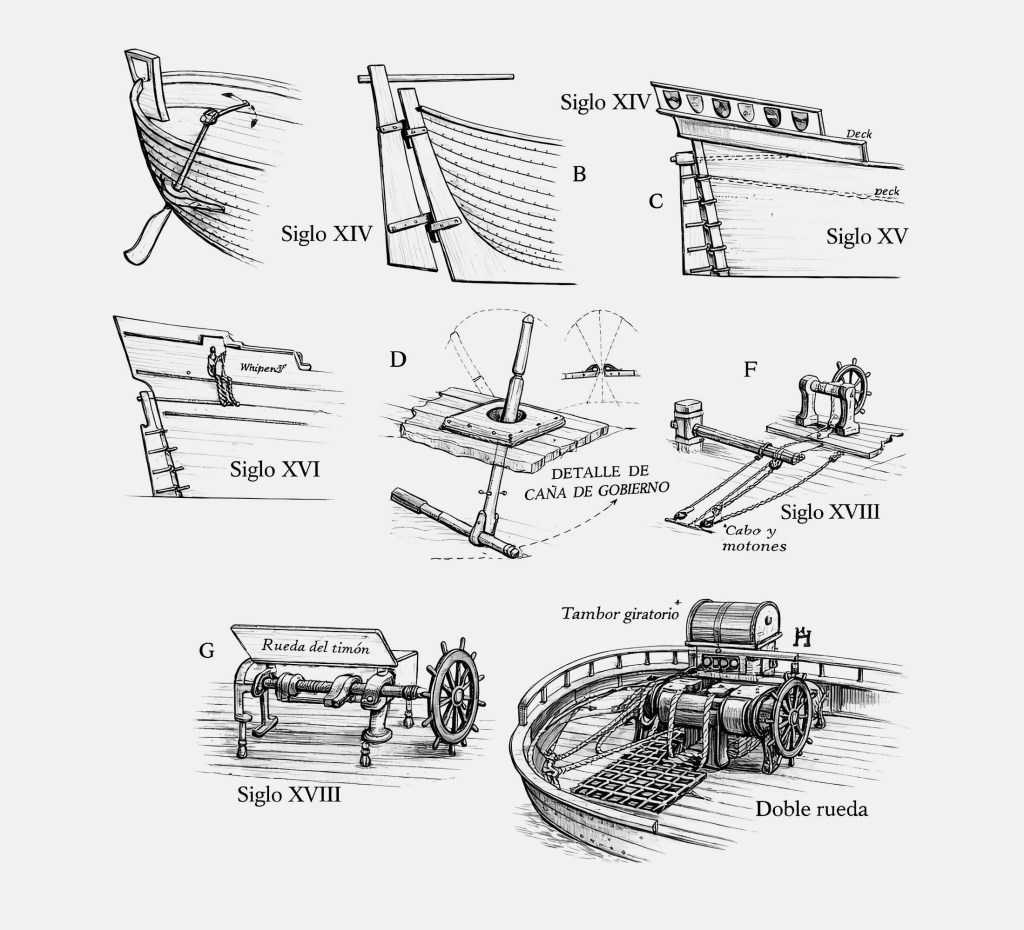
En el siglo XV apareció el timón de codaste, una pala fija en un eje vertical, situada en el espejo de popa en la crujía del barco, introducido en Europa del Norte. Permitía guiñadas con viento de popa y través se movía tirando de una barra horizontal.
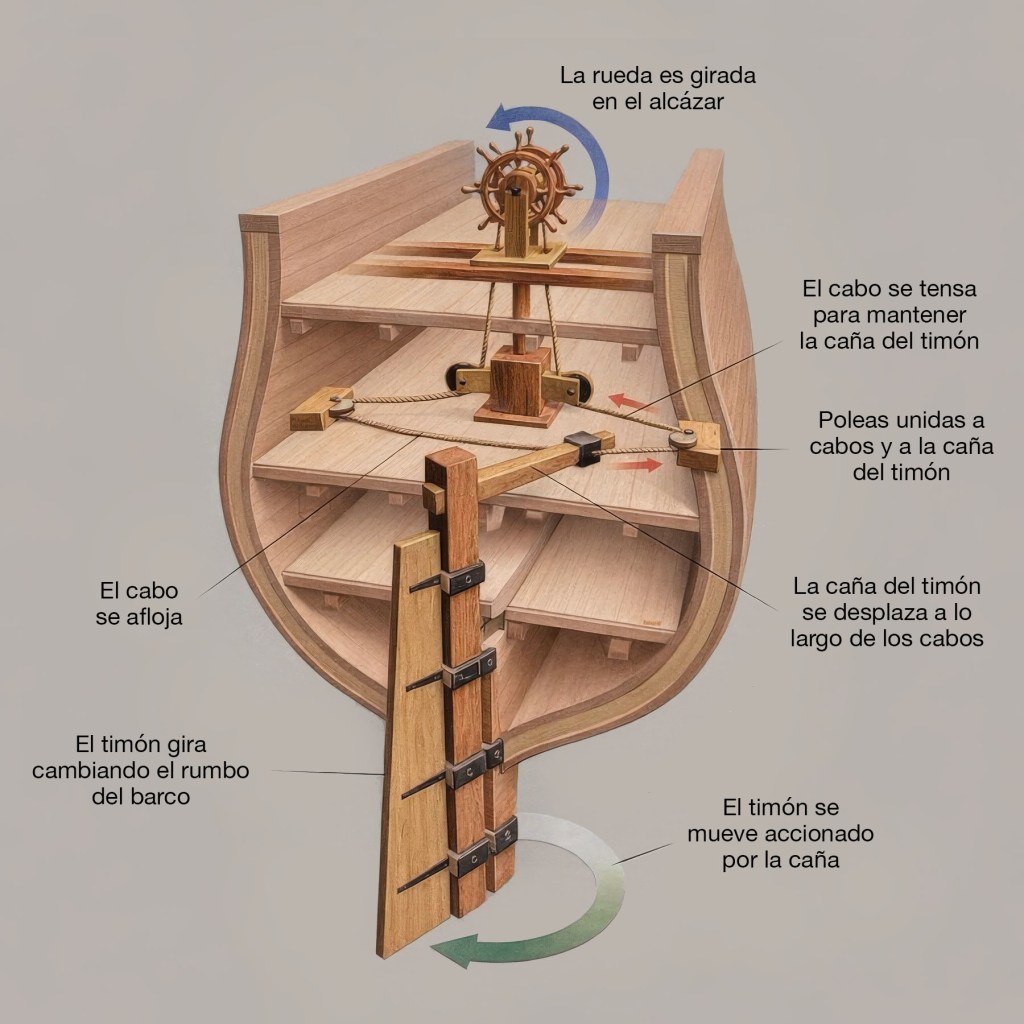
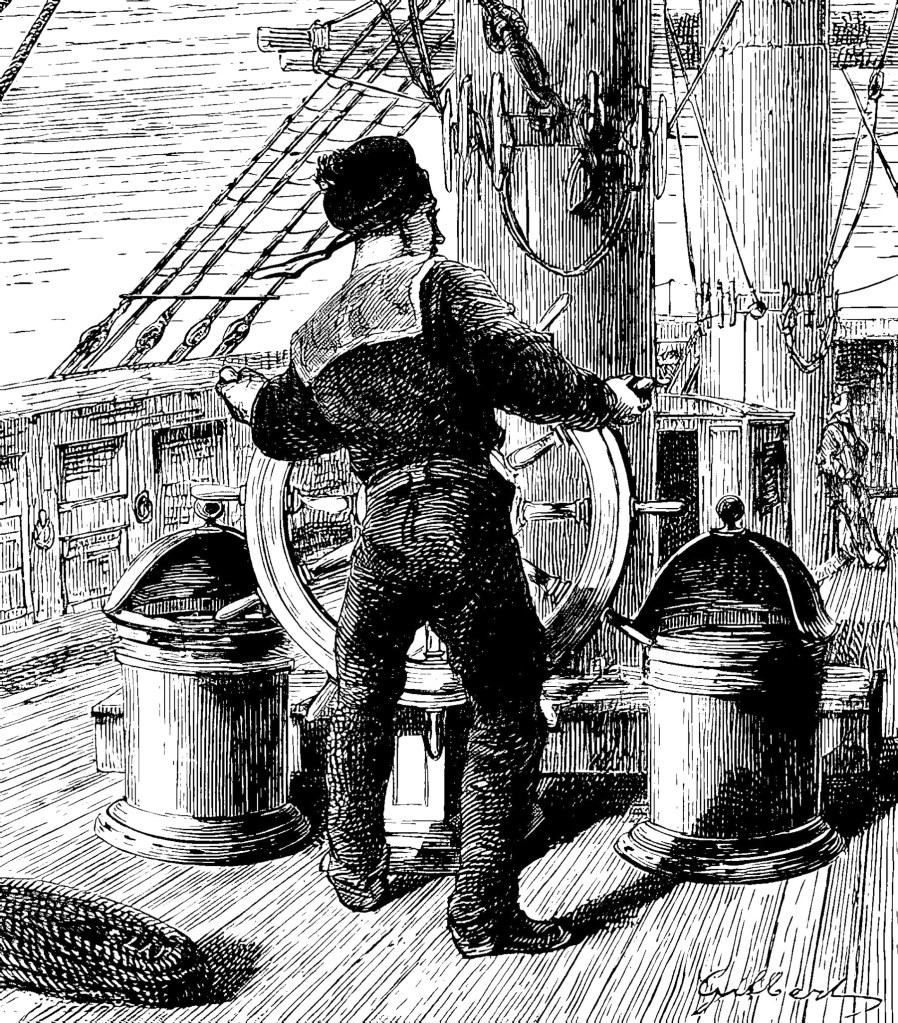
No sería hasta el siglo XVI que se empezarían a introducir cables y varas de timón desde la barra de gobierno hasta el puente con aparejos de motón para multiplicar fuerza. En fragatas y galeones, barcos de gran desplazamiento, el timonel usaba un cabrestante para poder mover el eje. En el siglo XVIII, hacia 1700-1730, aparece la rueda de timón, en buques de línea británicos y franceses. Un sistema de cascos, barras y roldanas que acoplaba la rueda al eje de la caña. Multiplicaba la fuerza humana y permitía giros rápidos.
Durante la primera mitad del siglo XIX, hasta 1850, se seguían empleando los mismos sistemas mecánicos, pero las cañas eran más largas debido a las crecientes esloras. Empezaba la carrera de la velocidad y el tamaño en vapores de ruedas. en algunos buques se empezaron a añadir cabrestantes de timón accionados por hombres para vapores transatlánticos como el SS Great Western (1838). Los sistemas de gobierno asistidos por cilindros de vapor directo o servomotores hidráulicos no llegarían hasta la segunda mitad del siglo XIX.
Los primeros sistemas hidráulicos de ayuda al gobierno, pero aún lejos de un piloto automático
En la segunda mitad del siglo XIX se comenzó a experimentar con centrales de gobierno hidráulicas y de vapor para facilitar el movimiento del timón en grandes buques, coincidiendo con la expansión de los vapores transatlánticos y acorazados de casco metálico. Entre 1860s y 1870 algunos buques a vapor experimentales comenzaron a emplear cilindros de vapor directo para ello.

El SS Great Eastern (1858) disponía de un pionero sistema auxiliar de vapor para asistir al timón en emergencias. Algunos buques franceses, como el acorazado Magenta (1861) también experimentaron con servomotores de vapor directo. Estos sistemas resolvían el problema de los timones gigantescos de los vapores de entre 200 y 300 pies en los que un timonel solo no podía moverlos rápido contra mar gruesa o en maniobras de combate. Un servomotor hidráulico o de vapor multiplicaba la fuerza unas 20–50 veces, permitiendo giros completos en menos de un minuto.

En la década de 1870 aparecerían los primeros sistemas hidráulicos prácticos para timones en buques de guerra británicos. El HMS Devastation (1871) incorporó un servomotor hidráulico accionado por bombas de la máquina principal, que multiplicaba la fuerza humana en la rueda del timón. La compañía Brown Brothers (Escocia) patentó en 1880 los primeros sistemas hidráulicos comerciales para vapores de línea y cruceros. El SS Servia de Cunard (1881) fue uno de los buques pioneros en la instalación de estos sistemas.

Esos servomotores hidráulicos fueron el preámbulo técnico del piloto automático: cuando Elmer Sperry conectó un girocompás Sperry a un servomotor hidráulico de timón hacia 1910–1912, nació el verdadero piloto automático. La hidráulica ya existía. Ahora los ingenieros se enfrentaban al desafío de desarrollar un sistema autónomo de gobierno que pudiera mantener un rumbo dado sin desviaciones ni interveción humana.
El gobierno antes de los pilotos automáticos
Durante siglos el sistema fundamental de gobierno era muy simple. Un compás magnético (aguja o rosa de los vientos sobre imanes) indicaba el rumbo respecto al norte magnético mientras un timonel trataba de mantener la marca del compás alineada, corrigiendo constantemente con el timón. Este compás se fue perfeccionando al incorporar suspensión en cardanes, rosas más legibles, iluminación, cubiertas protectoras, compensaciones de desvío con imanes y masas blandas… pero se seguía dependiendo de la presencia de un hombre al timón.
Para reducir el trabajo del timonel se usaban los recursos disponibles en la época que ayudasen a que el barco tuviese la tendencia a ir recto. No eran sistemas automáticos. Antes de la llegada del vapor, cuando sólo se navegaba a vela, se izaban velas de estabilización generalmente a popa, para mantener el rumbo. Estas velas, mesanas, eran velas latinas triangulares fundamentales para asegurar cierta estabilidad. Actuaban como un timón aerodinámico para equilibrar la fuerza de las velas cuadras de proa y centro, permitiendo al barco mantener un rumbo con menos desviaciones. Era fundamental la forma del casco. Un casco bien equilibrado y una correcta distribución de los aparejos que, bien trimados, requerían pocas correcciones ayudaba a mantener el rumbo. En barcos de pesca y travesías lentas, arrastrar un peso o un aparejo podía amortiguar guiñadas y hacer la derrota más estable. Todas estas técnicas aligeraban el trabajo del timonel, pero no le liberaba de tener que seguir manteniendo el rumbo del barco.
Antes de la invención del girocompás, mantener rumbo consistía ya no sólo en no desviarse, sino también saber dónde se estaba. Equipados con una brújula magnética, una corredera midiendo la velocidad y un reloj, durante siglos, de arena, se hacía una navegación de estima. Siguiendo un rumbo magnético, conociendo la velocidad y llevando un riguroso control del tiempo, se calculaba una derrota estimada. La precisión del rumbo dependía de lo bien que el timonel mantuviera la aguja y de lo bien que se corrigieran la variación entre norte verdadero y magnético y el desvío, errores producidos por el propio buque.
Hubo algunos intentos de autogobierno parcial, pero muy rudimentarios, como dispositivos mecánicos de autocorrección de la caña en barcos pequeños que consistían en sistemas de brazos, muelles y contrapesos que tendían a centrar el timón. Estos ingenio sólo resultaban útiles para la pesca o el remolque, pero no podían mantener un rumbo preciso contra viento y mar. .
Un experimento de laboratorio para demostrar el movimiento de la tierra revoluciona la navegación: de Bohnenberger a Foucault
Los giróscopos nacieron como una curiosidad de laboratorio y terminaron siendo el corazón de los girocompases y de los pilotos automáticos modernos de buques y aviones. En el mar, permitieron liberarse de las servidumbres del magnetismo terrestre y del hierro del casco, y abrieron la puerta al gobierno automático de grandes barcos y de la náutica de recreo.
El espejillo giratorio: la creación del primer horizonte artificial.
El predecesor del giroscopio
En 1743 el capitán John Serson, quien apenas sabía leer y escribir, trataba de resolver un serio problema para los navegantes. En el siglo XVIII los marinos calculaban la posición de subarco usando un cuadrante para tomar un ángulo desde el sol hasta el horizonte. Pero si había niebla, bruma o condiciones de visibilidad reducida, no se podía ver el horizonte. Serson se preguntó si podría crear un horizonte artificial: algo que permaneciera nivelado incluso a pesar del cabeceo y balanceo de un abrco. La inspiración le llegó al observar un juguete, básicamente una peonza, que giraba sobre sí mismo,
Así creó un disco muy pesado, al que adhirió un espejo. Lo montó sombre un eje giratorio, que accionaba manualmente hasta alcanzar la asombrosa velocidad de 1000-2000 RPM. El disco, al girar, conservaba su plano horizontal por momento angular (rigidez giroscópica), simulando un horizonte artificial pese al balanceo del barco.
Permitía el uso del sextante o el octante para medir alturas solares estelares sin visibilidad; Demostró, sin saberlo, el principio giroscópico básico de que un objeto que gira tiende a mantener su plano de rotación.ASí, se convirtió en el precursor de los giroscopios Bohnenberger y Foucault y anticipó los girocompases. Tras haber impresionado impresionar a dos oficiales navales de alto rango y a un eminente matemático, se le pidió a Serson que hiciera más observaciones a bordo del HMS Victory en el cual, el 5 de octubre 1744 , perdió la vida al naufragar en el canal de Mancha. Tan sólo 4 de los 1150 hombres a bordo sobrevivieron.
El primer aparato claramente reconocible como antecesor del giróscopo moderno fue la máquina de Bohnenberger, desarrollada por Johann Gottlieb Bohnenberger a inicios del siglo XIX para usos didácticos; utilizaba una masa rotatoria, originalmente una esfera, montada dentro de una suspensión cardánica (gimbal) que permitían estudiar la precesión1 y el movimiento en tres ejes.
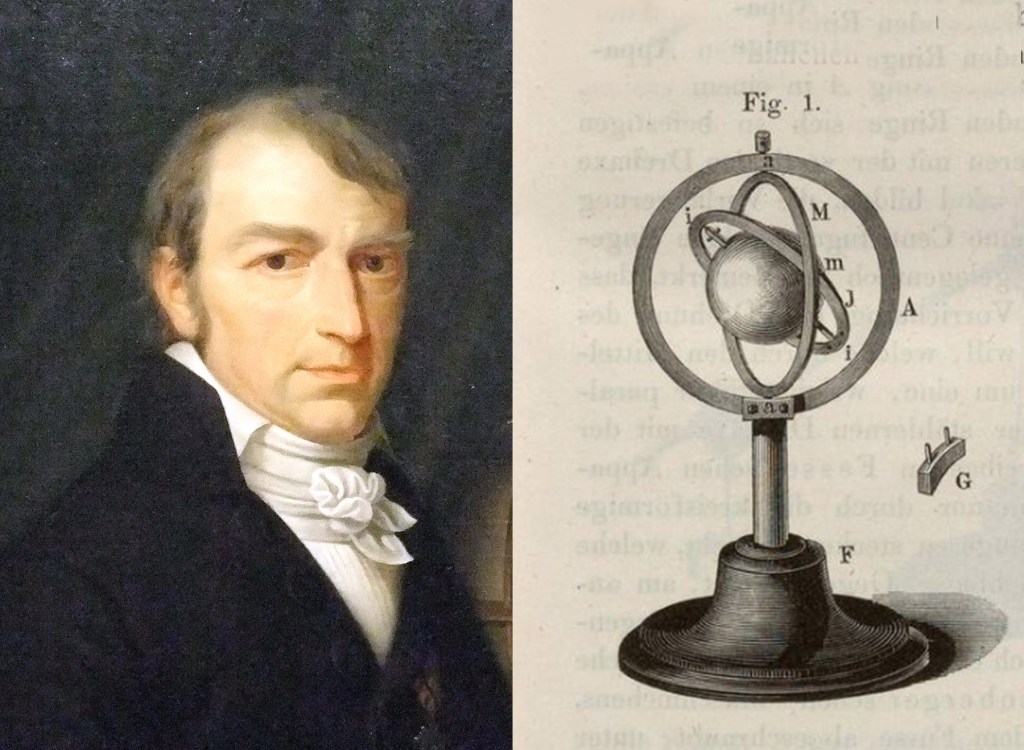
La máquina de Bohnenberger nace de la combinación de dos cosas: su trabajo como astrónomo y geodesta, y su interés por explicar de forma visual las leyes del movimiento y de la rotación de la Tierra. Johann Gottlieb Friedrich von Bohnenberger era matemático y astrónomo, implicado en la cartografía catastral de Wurtemberg y en problemas de geolocalización de precisión, donde la rotación terrestre y la mecánica celeste son esenciales. Para enseñar y comprender mejor estas leyes necesitaba instrumentos didácticos que tradujeran conceptos abstractos en movimientos visibles y manipulables.
En 1817 publicó una «Descripción de una máquina para la explicación de las leyes de rotación de la Tierra en torno a su eje, y del cambio de orientación del mismo», dejando claro que su finalidad explícita era ilustrar, de manera accesible, cómo se comporta un cuerpo en rotación y cómo cambia la orientación de su eje. Llamó a su aparato simplemente «la máquina”», una esfera pesada rotatoria montada de modo que permitía observar precesión y estabilidad del eje, es decir, el efecto giroscópico que luego se formalizaría mejor.
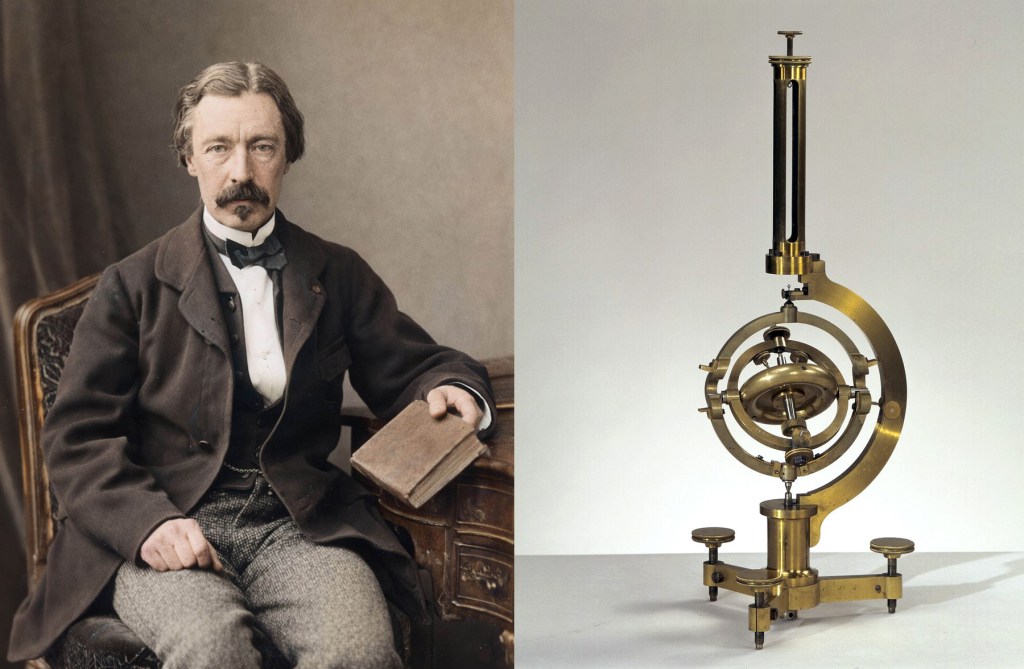
A mediados del siglo XIX, Pierre‑Simon Laplace recomendó el uso de estas máquinas como instrumentos de enseñanza en la École Polytechnique, lo que hizo que despertaran el interés de físicos como Jean‑Bernard Léon Foucault. Así, en 1852 Foucault bautizó el instrumento de Bohnenberger con el nombre de giróscopo, lo refinó mecánicamente y lo utilizó para demostrar la rotación de la Tierra, de modo análogo a su célebre péndulo. La demostración de la rotación de la Tierra sobre su eje mediante un péndulo fascinó a muchos contemporáneos de Foucault.
Sin embargo, el experimento era impreciso y el resultado variaba según la latitud: de hecho, el péndulo sólo podía completar una rotación completa en un día en los polos. En París, la rotación del péndulo era, por lo tanto, más lenta que la de la Tierra. Foucault perfeccionó su protocolo experimental y utilizó el giróscopo que había perfeccionado basado en el de Bohnenberger .
Este instrumento funciona según el mismo principio que una peonza: un toro (un disco de bronce con una protuberancia en el borde) se pone en movimiento mediante un mecanismo de manivela. Gracias a su altísima velocidad de rotación (entre 150 y 200 revoluciones por segundo), el toro deja de estar sujeto a la fuerza de la gravedad durante diez o quince minutos. A partir de entonces, basta con medir, con una aguja o un microscopio, la lenta rotación del cardán montado alrededor del toro para observar la rotación de la Tierra.
Van den Bos, Barend Janse, Krebs y el primer girocompás
Los giróscopos de demostración de esa época se fabricaban con rotores de acero o latón cuidadosamente equilibrados, montados en cardanes de bronce o acero, y se accionaban inicialmente a cuerda o mediante mecanismos de reloj. Su uso era fundamentalmente científico y didáctico para demostrar la conservación del momento angular2 y la rotación terrestre en universidades y escuelas técnicas.
En 1885, los holandeses Marinus (Martinus) Gerardus van den Bos y Barend Janse fueron los precursores que llevaron el giróscopo desde los laboratorios al mar. Solicitaron en Alemania la patente DE34513 para un girocompás, considerada la primera patente de un modelo funcional de girocompás.
La idea básica era utilizar un giróscopo como referencia de rumbo independiente del magnetismo terrestre, anticipando el principio de los girocompases navales posteriores. Sin embargo, la realización práctica propuesta por Van den Bos no resultó adecuada para el uso en buques de guerra: su dispositivo resultó demasiado delicado, difícil de mantener estable y no resolvía bien las perturbaciones producidas por el balanceo y cel abeceo de un casco en el mar. Por esa razón, aunque su patente marcó un hito histórico, nunca llegó a convertirse en equipamiento operativo
El problema del compás magnético en los buques
La transición de los buques de madera a los de casco de hierro a principios del siglo XIX provocó una crisis de navegación. Los barcos de hierro generaban potentes campos magnéticos que afectaban gravemente la precisión de la brújula, causando peligrosos errores de navegación. Los barcos se desviaban de su rumbo sin darse cuenta, a veces con consecuencias catastróficas. Los arquitectos navales y los navegantes necesitaban desesperadamente una solución que funcionara independientemente de las interferencias magnéticas.
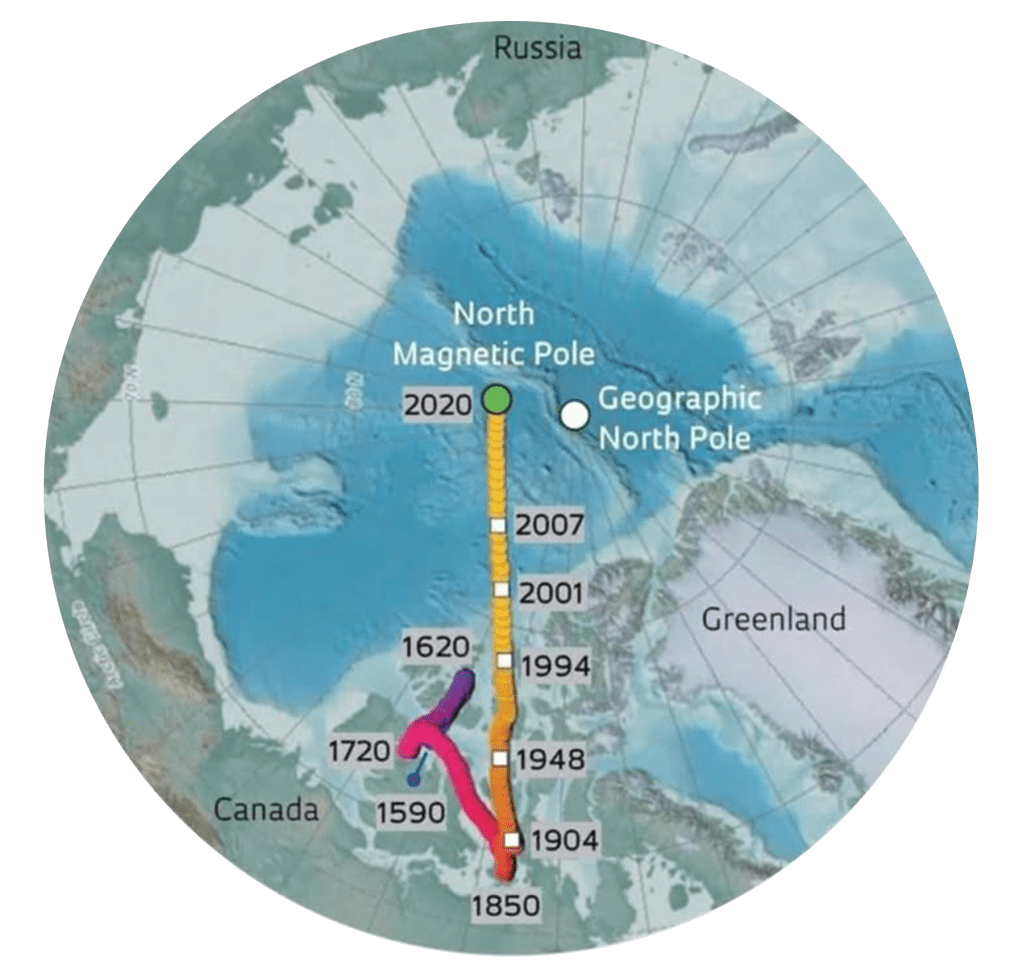
La declinación magnética –la diferencia entre el norte magnético y el norte verdadero— variaba significativamente a lo largo del globo y cambiaba con el tiempo. Los navegantes debían recalcular constantemente su rumbo utilizando complejas cartas de declinación, lo que propiciaba errores humanos en momentos críticos de la navegación.
En los buques de casco metálico, el compás magnético sufre dos grandes tipos de error: la variación (desvío por la forma del campo magnético terrestre según la posición geográfica) y el desvío, esto es, la influencia magnética propia del barco debido a su masa de metal . Esta desviación está causada por el acero del casco, por masas de hierro próximas al compás y por instalaciones eléctricas. Cambia con el rumbo, con las cargas y con el envejecimiento magnético del buque. Para utilizar un compás magnético con precisión había que abatirlo o compensar la aguja.
Había que describir con el buque un giro completo o rumbos sucesivos, registrar el error en cada rumbo y elaborar una tarjeta de desvíos que el timonel debía consultar y aplicar constantemente. En la práctica, en situaciones de combate, mala mar o navegación costera compleja, esa dependencia de correcciones manuales y la sensibilidad a cualquier pieza de hierro cercana convertían al compás magnético en un instrumento delicado y potencialmente peligroso. Había que encontrar una forma de disoner de un compás fiable que no se viera afectado por las desviaciones.
La revolución del girocompás: un nuevo paradigma de navegación
La aparición de la tecnología giroscópica entre 1852 y 1908 transformó radicalmente la filosofía de la navegación marítima. A diferencia de las brújulas magnéticas, que dependían del campo magnético terrestre, las giroscópicas utilizaban la rotación del planeta, un punto de referencia mucho más estable y predecible.
La idea clave del girocompás es aprovechar que un giróscopo de alta velocidad, convenientemente suspendido y amortiguado, tiende a alinearse con el meridiano verdadero debido a la combinación de la conservación del momento angular y de la rotación de la Tierra. A diferencia del compás magnético, el girocompás apunta al norte verdadero, no al norte magnético, y es prácticamente inmune a las perturbaciones magnéticas del casco o de equipos eléctricos.
Arthur Krebs y el giroscopio eléctrico del Gymnote
El Gymnote (Q1), botado en 1888, fue uno de los primeros submarinos totalmente eléctricos, desarrollado en Francia por Henri Dupuy de Lôme, Gustave Zédé y el capitán Arthur Constantin Krebs. Para este submarino, Krebs diseñó el motor eléctrico de propulsión, el primer periscopio naval operativo y el primer girocompás (o giroscopio de rumbo) eléctrico de uso naval. El casco de acero, las baterías y la imposibilidad de usar un compás magnético fiable en inmersión hacían del submarino el entorno ideal, y a la vez más problemático, para experimentar con referencia de rumbo giroscópica.
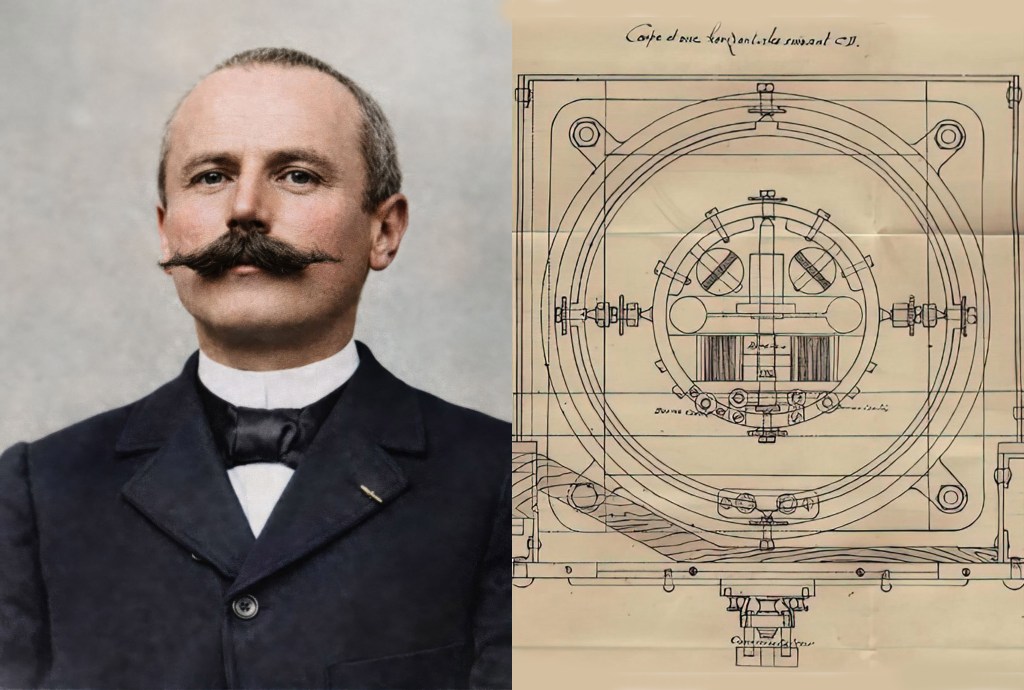
En 1889 Krebs acopló un motor eléctrico propio al giróscopo Dumoulin‑Froment, derivado de los de Foucault, creando un giróscopo marino motorizado para la Marina francesa. Este dispositivo era un giróscopo marino de tipo pendular eléctrico: un rotor giroscópico impulsado por motor eléctrico, montado de manera pendular para que, bajo la acción de la gravedad y la rotación terrestre, tendiera a alinearse con una dirección de referencia, actuando como predecesor de un girocompás práctico.

Este giróscopo motorizado se instaló en el Gymnote y permitió ensayar, por primera vez en condiciones reales, un sistema de rumbo basado en un giróscopo eléctrico en un submarino operativo. Su misión era estabilizar el rumbo y dar una referencia relativamente independiente de las perturbaciones magnéticas del casco y de las baterías, lo que resultaba crítico cuando el submarino maniobraba sumergido o en mala visibilidad.
El girocompás o giroscopio eléctrico de Krebs permitió al Gymnote llevar a cabo misiones demostrativas notables. Su sistema de rumbo giroscópico contribuyó a que el submarino pudiera romper un bloqueo naval en 1890, maniobrando con precisión bajo el agua. Desde el punto de vista histórico, el Dumoulin‑Krebs gyroscope de 1889 se considera uno de los primeros ejemplos de giróscopo marino eléctrico realmente instalado en un buque de guerra, y un paso intermedio claro entre las patentes pioneras (como la de van den Bos) y los girocompases industriales que aparecerían pocos años después.
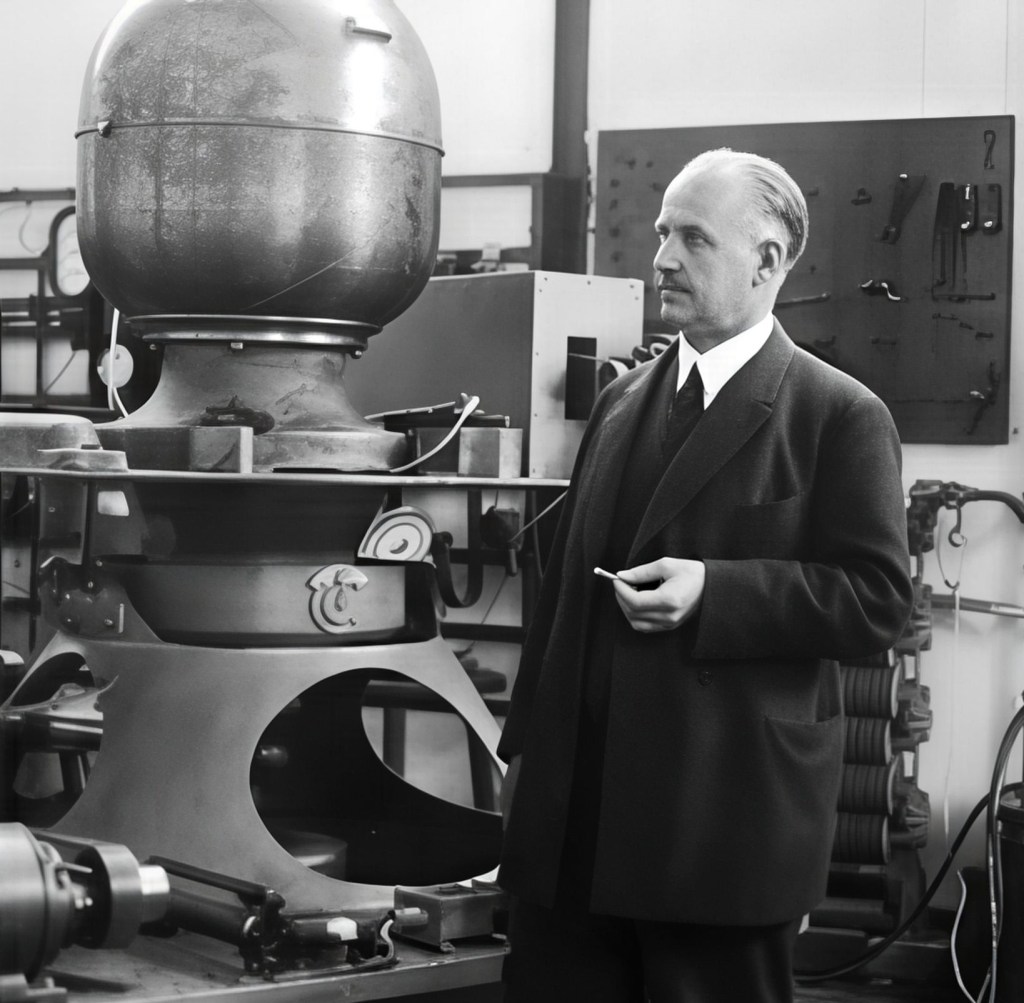
El girocompás de Hermann Anschütz-Kaempfe
El alemán Hermann Anschütz‑Kaempfe fundaba, en septiembre de 1905, su empresa Anschütz & Co. KG en el centro de Kiel. Desarrollaba un sistema para solucionar los problemas de navegación de los submarinos que pretendían operar bajo el casquete polar, y diseñó un girocompás con rotores de acero de alta velocidad, alimentados por motor eléctrico y montados en un sistema de suspensión que permitía compensar los balanceos y cabeceos de un buque y disponer de una indicación estable del norte verdadero incluso bajo el agua.
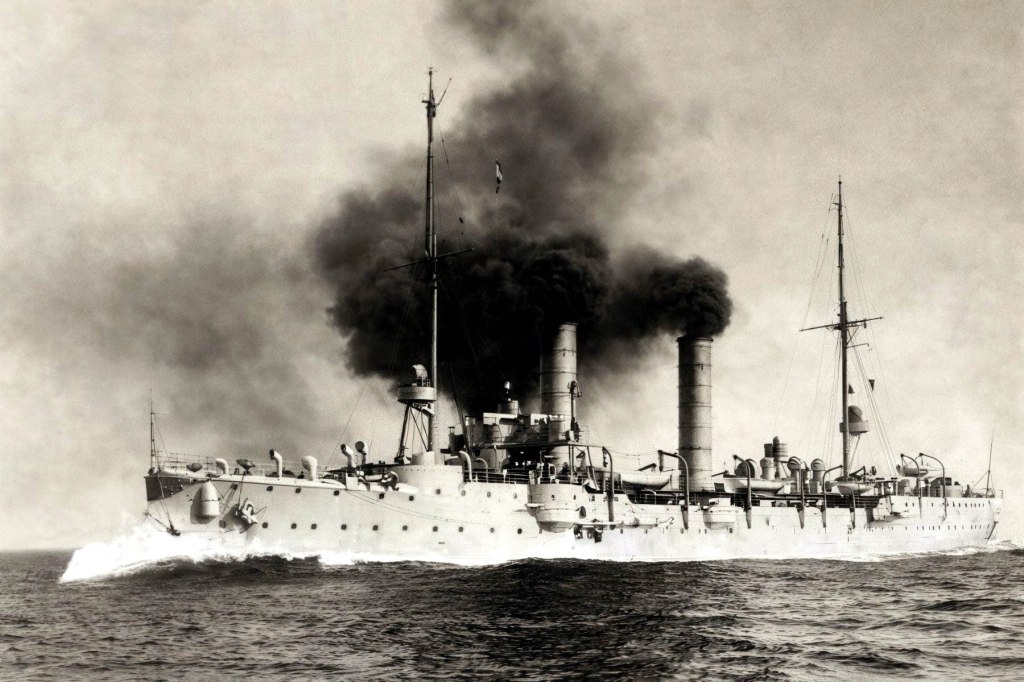
Las primeras pruebas de su invento, el Gyro Course keeper (Guardián Giroscópico de Rumbo ), se realizaron con un pequeño barco en el lago Starnberg, cerca de Múnich. En 1906 la Marina alemana instaló un prototipo en el crucero Undine y lo sometió a pruebas muy exigentes, como cambios bruscos de máquina, movimiento de torres de artillería y disparo de cañones pesados; donde el compás magnético era inservible, el girocompás mantenía una indicación de rumbo fiable. Observó que el nuevo aparato era bastante estable frente a las vibraciones y los impactos causados por los cañones, pero se veía drásticamente afectado por las olas del fiordo exterior de Kiel. Concluyó que el principio básico era bueno, pero estaba seguro de que era necesario integrar más mejoras para estabilizar el sistema para su uso en buques marítimos.
En 1907 Max Schuler, primo de Kaempfe, se incorporó a la empresa. Era ingeniero y un excelente matemático que realizó los cálculos básicos de los sistemas de balanceo de los giroscopios. Esto sentó las bases para posteriores mejoras y sistemas mucho más estables. Anschütz y Schuler registraron varias patentes adicionales. Una idea era combinar tres giroscopios en lugar de dos. Se obtuvo la patente en 1911 y realizaron pruebas a bordo del acorazado Moltke El éxito llevó a instalar girocompases Anschütz ese convirtieron en equipamiento estándar de los submarinos U‑Boote y grandes buques de guerra incluido el acorazado Deutschland, y barcos de línea, dando a la Marina Imperial una capacidad de navegación sumergida y de combate en mala visibilidad muy superior a la que permitían los compases magnéticos antes de la Primera Guerra Mundial. La navegación comercial también estaba interesada en obtener brújulas giroscópicas. El primer barco comercial equipado con un compás giroscópico Anschütz fue el barco de pasajeros Imperator de HAPAG Line en el año 1913 que, con un desplazamiento de 52.000 toneladas, era el barco más grande en aquella época.
El enfoque de Sperry en estados Unidos
Elmer Ambrose Sperry fundó varias empresas para construir maquinaria eléctrica para minería, ferrocarriles eléctricos y automóviles eléctricos. Pero su obra más importante giró en torno a los giroscopios. Comenzó cuando se topó por primera vez con un barco que se balanceaba en una travesía transatlántica alrededor de 1900. Los grandes clíperes eran bastante estables en el agua, pero los nuevos vapores con casco de acero eran tan bajos que actuaban como péndulos en el agua, balanceándose de un lado a otro a un ritmo regular que podía llegar a ser extremadamente desagradeble para los pasajeros, e incluso para muchos marineros experimentados que no podían evitar el mareo y el vómito.

Casi al mismo tiempo que Hermann Anschütz‑Kaempfe al otro lado del Atlántico, a Sperry se le ocurrió la idea de intentar estabilizar los barcos con giroscopios. Otros habían usado giroscopios en barcos con anterioridad, pero no habían resultado ser muy efectivos, ya que eran pasivos y esperaban a que el barco se balanceara antes de reaccionar. Sperry tuvo la idea de usar un giroscopio pequeño y sensible para detectar el inicio de un balanceo, que entonces activaba una serie de servomotores para comenzar a procesar los giroscopios principales, mucho antes de que el barco comenzara a balancearse.
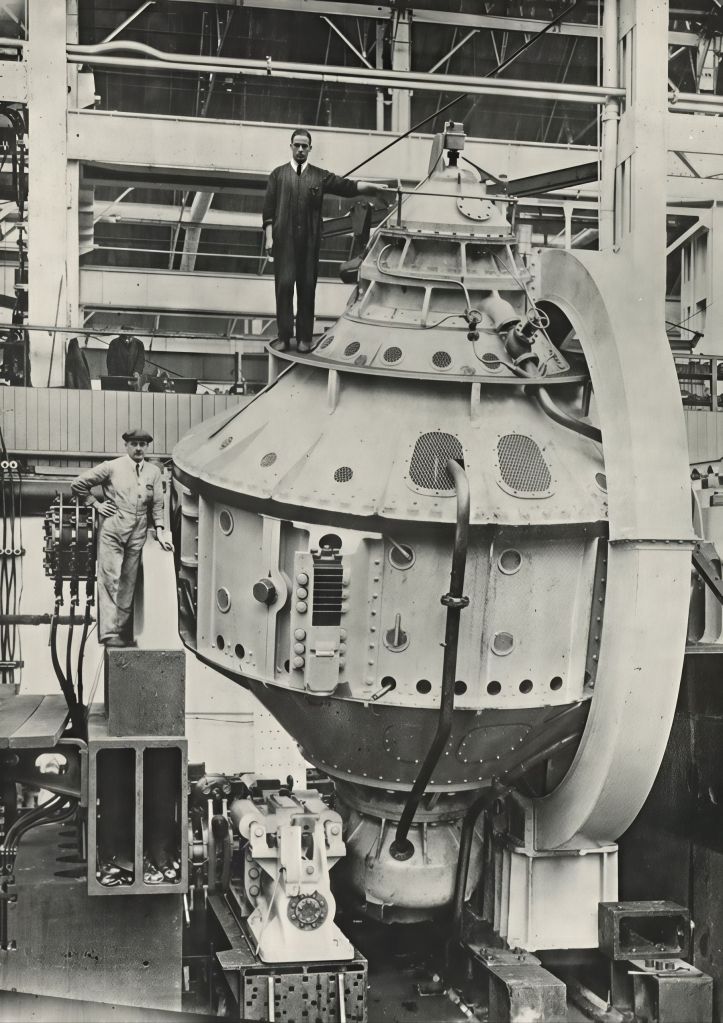
Instaló sus giroscopios en algunos buques de la Armada estadounidense alrededor de 1910 dando excelentes resultados. Para cuando Estados Unidos entró en la Primera Guerra Mundial, los giroestabilizadores Sperry ya se habían instalado en varios buques de guerra, aunque su costo impidió un uso más generalizado.
En la actualidad los grandes cruceros y decenas de superyates y barcos de pesca están equipados con giroestabilizadores Son sistemas giroscópicos diseñados para reducir el balanceo. Consisten en un volantes de inercia masivos (hasta 1700 kg en modelos grandes) que giran a 4000-12.000 RPM sobre un eje vertical, montado en cardanes. El enorme momento angular de genera rigidez. Cuando las olas provocan balanceo, la precesión del rotor crea un torque opuesto que estabiliza el barco, cortando hasta en un 95% las oscilaciones tanto navegando como fondeado.
El otro gran invento de Sperry relacionado con los giroscopios fue la brújula giroscópica. Sperry encontró la manera de convertir un giroscopio en una brújula mucho más precisa que una brújula magnética. Las brújulas giroscópicas, a diferencia de los estabilizadores giroscópicos, no eran tan caras de fabricar y se instalaron en todos los buques de la Armada al final de la guerra. Fundó la Sperry Gyroscope Company en 1910 en Brooklyn, Nueva York. A partir de 1911 comenzó a suministrar girocompases a la US Navy, adaptados a las necesidades de los acorazados y cruceros, integrándolos además con repetidores y sistemas de control de tiro para artillería naval. Los girocompases Sperry servían no sólo como compás principal de rumbo, sino como referencia para el control de tiro de baterías principales y para estabilizadores de balance.
Sperry Vs. Anschütz: la lucha de las patentes
Kaempfe había inventado el primer girocompás práctico, base del piloto automático náutico, en 1904-1906, con patente alemana (DE182855) presentada el 26 de marzo de 1904 para un Kreiselapparat (aparato giroscópico). Construyó un prototipo funcional en 1907 (mono-giroscopio), probado en 1908 en el acorazado alemán Deutschland, y perfeccionó el modelo multi-giroscopio en 1912, probado en el crucero Moltke.
Sperry patentó su sistema de gobierno automático en 1908 en los Estados Unidos. El suyo, al igual que de su competidor alemán, consistía en un sistema giroscópico que conectaba giroscopios y brújulas al timón para mantener el rumbo de barcos sin intervención humana constante. En 1911 ya se instalaban los sistemas de Sperry en buques de la Armada estadounidense, ganando rápidamente reputación mundial por su uso en decenas de navíos militares.
Mientras, en Alemania, Anschütz‑Kaempfe y su firma continuaron refinando el instrumento, introduciendo en 1912 un modelo con tres rotores dispuestos en triángulo equilátero, menos sensible a los balances del buque y especialmente apto para submarinos.
Ambos sistemas competían comercialmente, y en 1914 Sperry intentó vender su girocompás a la Marina alemana, lo que llevó a Anschütz‑Kaempfe a demandarle por infracción de patentes ante los tribunales de Berlín. Las principales diferencias entre el piloto automático de Anschütz-Kaempfe y el de Sperry radicaban en el diseño del girocompás, los sistemas de amortiguamiento y la comercialización. Aunque ambos usaban giroscopios para indicar el norte geográfico y controlar el timón automáticamente.

Los sistemas de amortiguación en los primeros pilotos automáticos de Anschütz-Kaempfe y Sperry eran imprescindibles para estabilizar el girocompás frente ante los movimientos del barco, evitando oscilaciones y manteniendo la precisión del rumbo.
Anschütz-Kaempfe empleaba un método pendular con mercurio. Un conjunto de pesos pendularesy depósitos de mercurio generaban fuerzas que contrarrestaban la precesión giroscópica, estabilizando el eje horizontalmente. El amortiguamiento de Sperry empleaba un sistema pendular de fricción con muelles y pesos móviles en un marco cardánico que aplicaban torque3 de corrección ante desviaciones, más simple pero menos efectivo en condiciones extremas según tribunales alemanes.
El tribunal nombró a Albert Einstein como perito, quien en un principio inicialmente se mostró favorable a Sperry, pero tras revisar más a fondo las patentes y los principios de diseño, modificó su opinión y apoyó los argumentos de Anschütz‑Kaempfe. En 1915 el fallo fue favorable a Anschütz‑Kaempfe, reconociendo la prioridad de sus patentes en el girocompás marino, mientras Sperry continuaba expandiendo su sistema en Estados Unidos y en marinas aliadas europeas, especialmente durante la Primera Guerra Mundial.
Del girocompás al piloto automático
El siguiente paso lógico fue conectar la información estable del girocompás a un sistema de gobierno automático. En 1912, Sperry y Anschütz‑Kaempfe propusieron, casi simultáneamente, sistemas que conectaban uno o varios giróscopos y un compás al sistema de gobierno, de manera que el timón se moviese automáticamente para mantener un rumbo determinado sin intervención constante del timonel. Estos primeros sistemas combinaban la señal del girocompás con servomotores hidráulicos o eléctricos aplicados a la caña o al servomotor del timón del buque.

Antes de la existencia del girocompás, el piloto automático de un buque era, esencialmente, un marinero al timón siguiendo el compás magnético y, en algunos casos, dispositivos puramente mecánicos de autocorrección de la caña basados en pesos, muelles y sistemas de transmisión, adecuados para pequeñas embarcaciones pero incapaces de mantener un rumbo preciso y estable en grandes buques o en mares duros. El girocompás permitió alimentar esos sistemas de gobierno con una referencia estable del norte verdadero, lo que hizo posible la automatización fiable del gobierno en travesías largas.
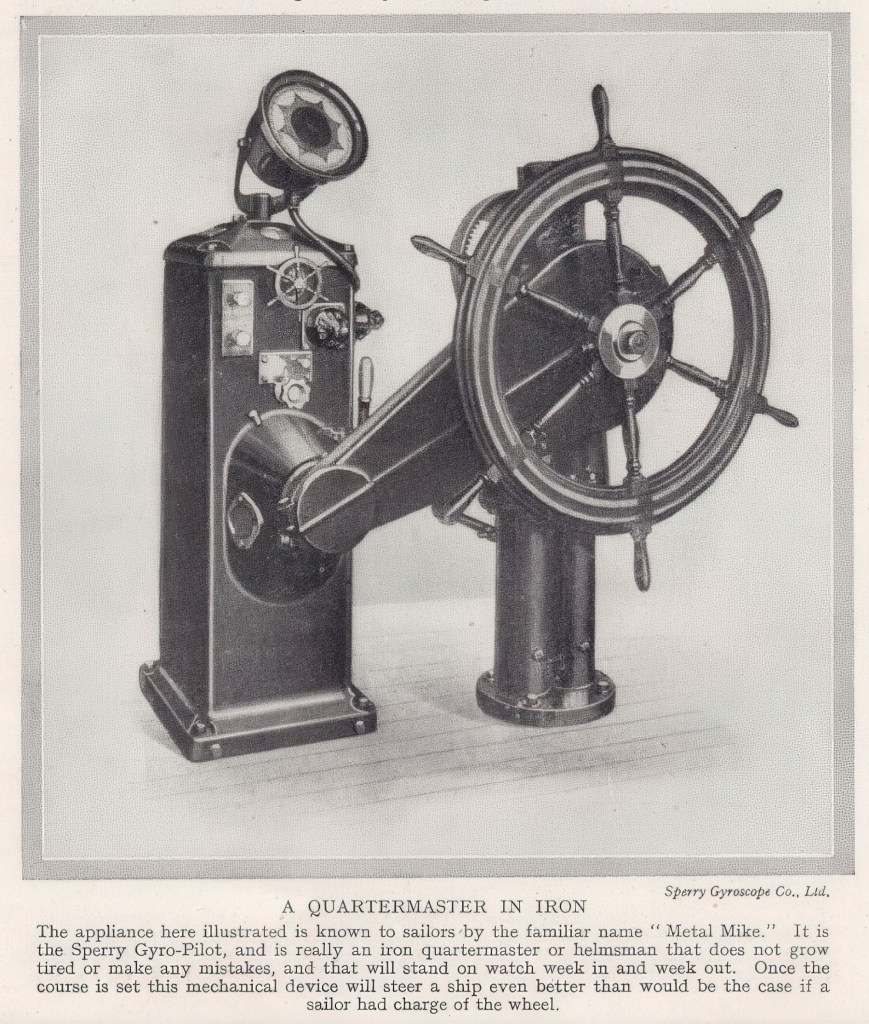
Sperry desarrolló el Gyro Pilot para barcos, un sistema de piloto automático que, a partir de la década de 1920, empezó a instalarse en grandes mercantes y trasatlánticos, utilizando el girocompás como sensor principal de rumbo y actuando sobre la servomáquina del timón. Estos pilotos podían mantener un rumbo con mucha mayor precisión que un timonel humano fatigado, reduciendo el consumo de combustible y mejorando la seguridad en navegación oceánica.
Pilotos automáticos en mercantes, buques de guerra, submarinos y náutica de recreo
En los grandes buques mercantes, el piloto automático vinculado al girocompás se convirtió en estándar a partir de entreguerras y, sobre todo, tras la Segunda Guerra Mundial, cuando los sistemas eléctricos e hidráulicos de gobierno se generalizaron. Los grandes transatlánticos, como el Aquitania de la Cunard, fueron pioneros en incorporar el girocompás Sperry como compás principal y, más tarde, sistemas de gobierno automático basados en él.
En el ámbito militar, los girocompases y pilotos automáticos jugaron un papel central en la precisión de derrota de acorazados, cruceros y portaaviones, al integrarse con radares y calculadores de tiro. En submarinos, el girocompás era esencial para mantener rumbos sumergidos sin referencia visual y, unido a pilotos automáticos y más tarde a sistemas de navegación inercial, permitió patrullas de larga duración con mínima exposición en superficie.

Los primeros sistemas de autogobierno en la náutica de recreo, se basaban en servos mecánicos y, más adelante, en pequeños pilotos automáticos que utilizaban compases eléctricos y, progresivamente, giróscopos y compases fluxgate.4 La tecnología de piloto automático para yates no se aplicó hasta alrededor de 1948, cuando se empezaron a instalar sistemas de autogobierno capaces de mantener un rumbo sin intervención constante del timonel. Se popularizaron gracias a la llegada al mercado de sistemas compactos, inicialmente electromecánicos y luego electrónicos, que a partir de la segunda mitad del siglo XX hicieron posible que un armador particular equipara su barco con un piloto automático fiable y relativamente asequible.
Los pilotos automáticos de los yates de la década de 1950 eran Sistemas electromecánicos pioneros, que a menudo incluían brújulas magnéticas simples, sensibles a la luz y robustos motores eléctricos, ejemplificado por marcas como Wood Freeman, Bendix y Roberson, entre otros. Estos pilotos automáticos utilizaban haces de luz, fotocélulas y embragues para ajustar la dirección, lo que introdujo el timón automático en las embarcaciones de recreo poco después de que la tecnología se trasladara del uso aeronáutico al marítimo a finales de la década de 1940 . Eran dispositivos que sobrecorregían el rumbo. Eran pilotos “cazadores de rumbo», oscilando de un lado a otro porque corregían en exceso de uno a otro lado, produciendo con frecuencia rumbos serpenteantes.
Wood Freeman: un golpe de botavara y una idea
Wood Freeman fue uno de los grandes pioneros del piloto automático puramente náutico cuyo diseño nació directamente tras una dura experiencia como pescador en la costa del Pacífico. Freeman era un ingeniero de minas y profesor universitario que también se dedicó a la pesca comercial en la costa del Noroeste del Pacífico de los Estados Unidos.
En 1926 se hallaba faenando salmón cuando una botavara se soltó y le golpeó rompiéndole la mandíbula por tres sitios y arrancándole varios dientes. Aturdido, sangrando y con un dolor insoportable, tanto que no era capaz de mantenerse en pie, pasó tres días tumbado sobre la mesa de la cocina del barco, gobernando sólo con los pies mientras miraba el compás a través de un espejo apoyado sobre su pecho para regresar a puerto. Durante la convalecencia decidió que aquello no podía volver a ocurrir y comenzó a diseñar un sistema de gobierno automático fiable para barcos de pesca, basado en su formación de ingeniero de minas y profesor de química.
De las soluciones artesanales al «Metal Marine Pilot»: En aquella época los pescadores usaban rudimentarios sistemas para mantener el rumbo de sus trawlers, izando velas de estabilización para ayudar, largando anclas de mar, o arrastrando plomos de pesca conectados a la caña del timón. Freeman siguió pescando mientras probaba ideas de detección del error de rumbo con compases magnéticos, conductividad de fluidos, sensores fotoeléctricos, y distintos sistemas mecánicos de ensayo y error.
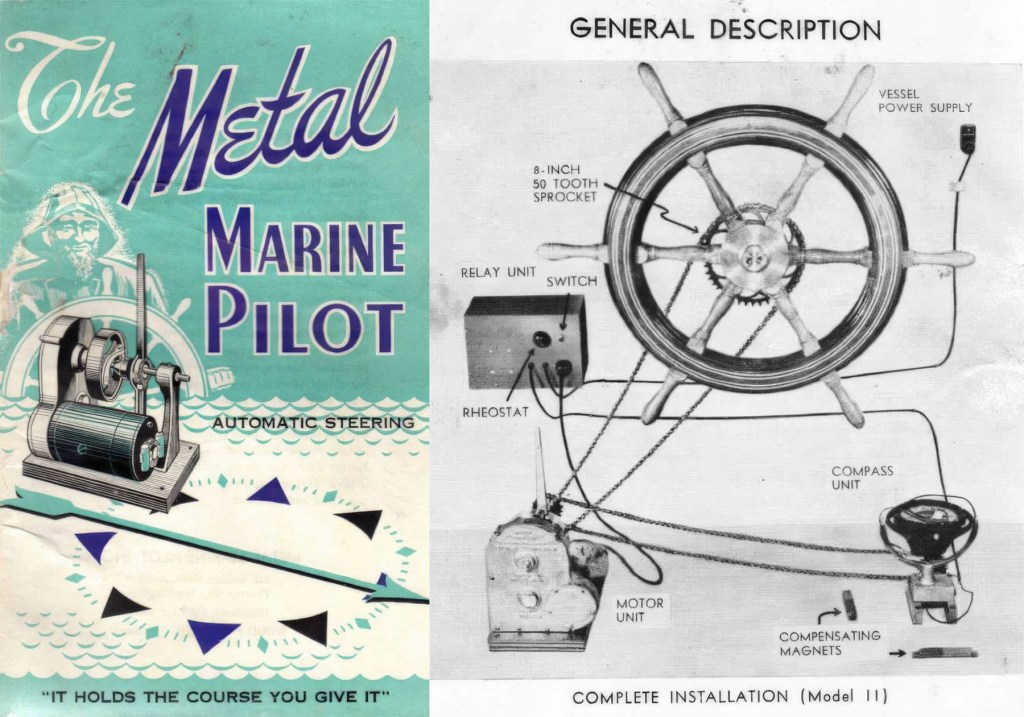
Finalmente concluyó que el método más eficaz y robusto era un sistema de contacto directo. Empleó una finos alambres, a los que llamó «bigotes de gato» que tocaban físicamente la carta del compás y cerraban un circuito cuando el barco se desviaba del rumbo deseado. En 1934 probó su primer equipo de producción, el Metal Marine Pilot Model 1, en el pesquero comercial Jean. Este fue el germen de la marca Wood Freeman Marine Autopilots, cuyos sistemas se siguieron usando durante décadas en pesqueros del Noroeste del Pacífico y otras zonas.
Elementos del sistema de Wood Freeman «Metal Marine Pilot»
Los Wood Freeman clásicos, como los Metal Marine Pilot posteriores, modelo 1, 15, etc. eran pilotos automáticos electromecánicos muy ingeniosos y robustos, pensados para barcos de pesca a motor que podían consumir sin preocupación bastante energía. Contaban de una serie de elementos:
Compás propio del piloto, un compás magnético grande, normalmente de tipo “bowl” del tamaño de una bola de bolos, según testimonios de usuarios, montado cerca del cerebro del piloto. Sobre la tarjeta del compás, unas patillas metálicas finas –bigotes de gato– que descansaban sobre el borde al fijar un rumbo de referencia. Sistema de detección de error: Cuando el barco mantenía el rumbo, las patillas quedaban centradas y no tocaban los contactos eléctricos. Si el barco se desviaba a babor o a estribor, la tarjeta del compás giraba y uno de los alambres tocaba un contacto: eso cerraba un circuito que mandaba al motor girar en un sentido u otro. Motor eléctrico y transmisión al timón Un motor eléctrico acoplado al sistema de gobierno (cable, cadena, rueda, barra de timón o hidráulica, según el barco). La energía del motor se transmitía mediante cables de torsión o mecanismos equivalentes al timón del barco; al recibir la orden, el motor metía timón a babor o a estribor hasta que el compás volvía a su posición de referencia.
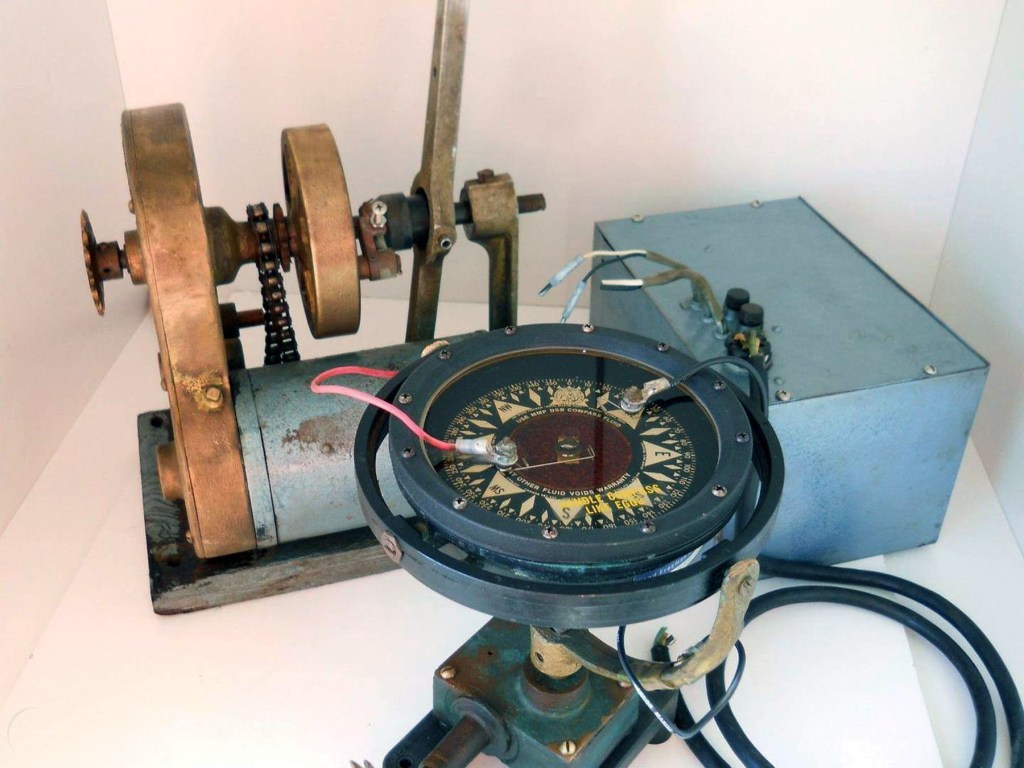
Los Metal Marine Pilot eran un pilotos que constantemente estaban corrigiendo un poco, girando ligeramente de un lado a otro para mantenerse alrededor del rumbo deseado ( hunting).. El patrón situaba el barco en el rumbo que quería, enganchaba el embrague mecánico del piloto que acoplaba el motor al mando de gobierno y el sistema empezaba a cazar el rumbo, actuando de forma continua, corrigiéndose constantemente.. A pesar de lo tosco que nos pueda parecer, en la práctica, el patrón quedaba libre para atender las artes, la máquina o el descanso, mientras el piloto mantenía el barco más o menos en la derrota indicada, con suficiente precisión para pesca de curricán, arrastre o navegación de guardia en costa. Eran sistemas largamente apreciados por su robustez y potencia, aunque hoy se consideran voluminosos y muy exigentes en consumo eléctrico comparados con pilotos electrónicos modernos.
El sistema de Freeman tuvo éxito entre pescadores del Pacífico noroccidental y en otros caladeros, hasta el punto de mantenerse en producción y uso durante buena parte del siglo XX. Su hijo Robert Freeman, creció ayudando en la fabricación de los pilotos marinos más tarde se hizo cargo de la empresa, desarrollando nuevos modelos y otros dispositivos de navegación.
Bendix
De los pilotos automáticos marinos Bendix hay realmente muy poca documentación. Lo que se conserva son sobre todo referencias de usuarios de la época y el contexto general de Bendix como fabricante de instrumentación y control. Aun así se puede trazar un cuadro razonable de qué eran y de dónde venían.

Bendix Corporation nació alrededor de 1914 con patentes de automoción, como el Bendix drive para motores de arranque. Entre los años 30 y 60 se expandió en hidráulica, aviación y electrónica de control. A lo largo de esos años desarrolló frenos, sistemas hidráulicos, instrumentación y pilotos automáticos para aviones, que luego se integraron en la línea Bendix King. Ese know‑how en servos, hidráulica y electrónica de control es el mismo que permitió ofrecer equipos de navegación y autopilotos también para el mundo marino (radio‑goniómetros, compases electrónicos y pilotos automáticos para barcos de recreo y pequeños yates a motor).
Pilotos automáticos Bendix para barcos
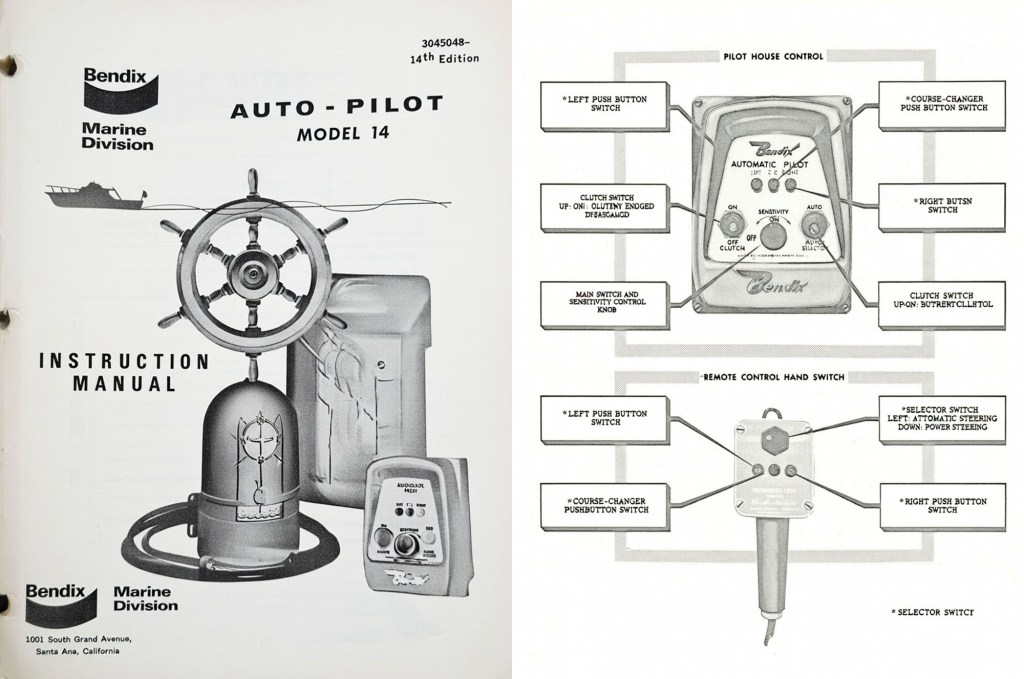
Las pistas más claras vienen de propietarios de clásicos, como por ejemplo, los armadores de los Chris‑Craft Constellation de 1965, que mencionan a bordo un Bendix Automatic Pilot, modelo 14 instalado de origen o como opción en los años 60. Bendix comercializó pilotos automáticos específicamente marinos, al menos en los años 50–60, probablemente orientados a motoras de crucero y yates a motor de gama media‑alta en EE. UU.Estos equipos seguían el patrón típico de la época y se componían de un compás (magnético o fluxgate) como sensor de rumbo, una unidad de control y amplificación (basada en electrónica analógica) y un servomotor eléctrico/hidráulico acoplado al sistema de gobierno.
La marca Bendix en aviación acabaría integrándose en Bendix / King (hoy Bendix King, bajo Honeywell), pero en el ámbito náutico los viejos pilotos Bendix han quedado como equipos de época, a menudo sustituidos hoy por pilotos modernos de Simrad, Raymarine, Furuno, etc., aunque siguen apareciendo en restauraciones de barcos clásicos. A partir de su experiencia en control automático y pilotos de avión, Bendix desarrolló en los años 50–60 pilotos automáticos para barcos de recreo y yates de motor que hoy sobreviven más como piezas históricas que como producto en uso.
Robertson
Fundada en los años 1950 en Stavanger (Noruega), Robertson empezó fabricando timones hidráulicos y pilotos automáticos para pesqueros y buques mercantes del Mar del Norte. Su gran avance llegó en la década de los 60 con el modelo AP6, uno de los primeros pilotos adaptativos comerciales. Éste usaba un algoritmo que aprendía la hidrodinámica del barco para minimizar oscilaciones (hunting). En esa misma década mejoraron el sistema con el modelo AP9, orientado a pesqueros, como su predecesor. ambos dispositivos, aprobados por Lloyd’s Register, ya integraban compás fluxgate compensado. En la década de 1970s comercializarían el AP20, primer piloto para yates basado en excedentes militares. Compacto, con control proporcional.
En los 80 la marca desarrollaría la línea AP35/AP3000 para recreo y buques comerciales pequeños. La compañia desarrolló una red de datos propia, red Robnet (precursora del actual estándar NMEA). Ya en los 90 su piloto AP9 MK3 con certificación IMO e interfaz para el control de hélices de maniobra se dominó flotas pesqueras escandinavas.
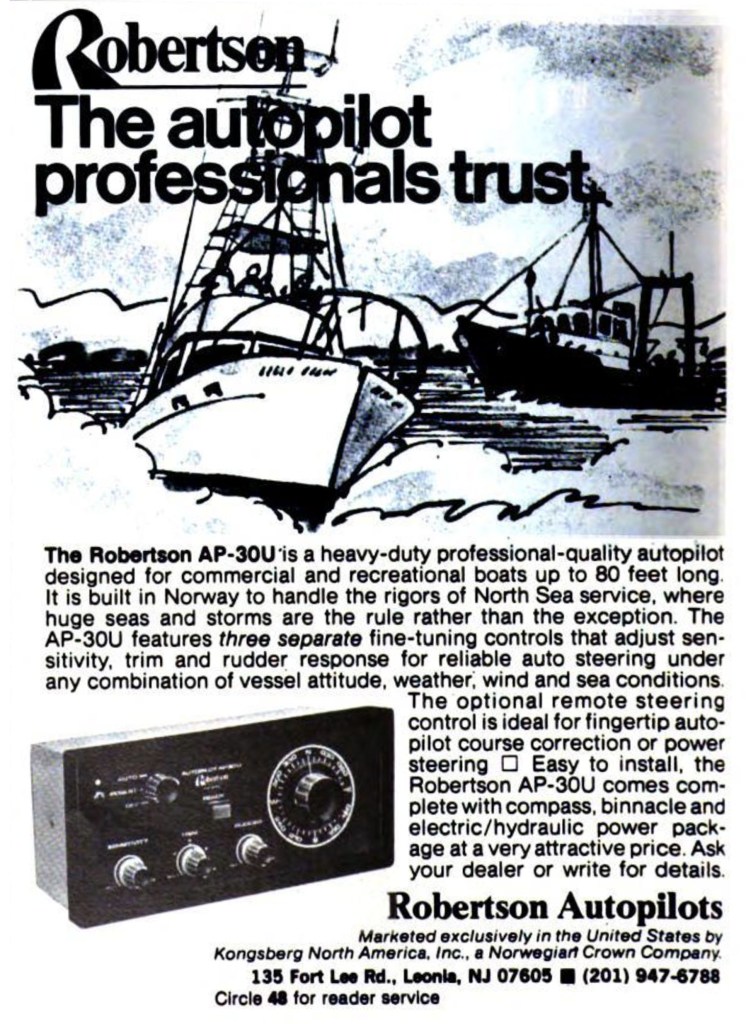
El control de dirección remoto opcional es ideal para la corrección del rumbo del piloto automático con la punta de los dedos o la dirección asistida. Fácil de instalar, el Robertson AP-30U viene completo con brújula, bitácora y paquete de energía eléctrico/hidráulico a un precio muy atractivo. Pregunte a su distribuidor o escriba para obtener detalles..»
En 1980s-1990s, Robertson se fusionó con Simrad (Navico Group, 2001). Sus diseños evolucionaron a Simrad AP20/AP24/AP28 (2000s), usados en yates, pesqueros y offshore. Hoy, bajo B&G/Simrad, su legado son los NAC-2/NAC-3 con herencia adaptativa.
Los pilotos automáticos llegan a la náutica de recreo
En 1973 se presenta el primer piloto automático de caña compacto para veleros de recreo, bajo la marca Autohelm (Nautech), un sistema autónomo de bañera alimentado a 12 V pensado específicamente para barcos gobernados con caña de timón y en 1974, el fundador de Nautech lanza comercialmente el Autohelm, que se convierte en un estándar en la náutica de recreo antes de que la compañía fuese adquirida por Raytheon en 1990, que hoy conocemos como Raymarine. Nacen los sistemas de gobierno ST4000/ST5000 que se convierten en el estándar de la náutica de recreo.

En los años 80 B&G (Brookes & Gatehouse), fundada en 1956 orientada a instrumentación de regata (RDF, corredera, viento, etc.) y desarrollando desde entonces sistemas avanzados de electrónica de navegación, se introduce en el mercado de los pilotos automáticos, especializados en el exigente mundo de las regatas. También en la década de los 80 Simrad (parte de Navico) presenta los pos pilotos de caña TP10/20/22 convirtiéndose en los pioneros en la integracióncon las redes NMEA y los datos del equipo de viento. En los años 90 del siglo XX, Garmin, Furuno, Lowrance se introducen en el mercado de pilotos en plena era del GPS y de la electrónica integrada.
Funcionamiento de los pilotos automáticos modernos
Los pilotos automáticos modernos de yates combinan brújulas fluxgate, giróscopos electrónicos, indicadores de viento y, a menudo, datos de GPS o plotter para mantener un rumbo, un ángulo de viento o seguir una ruta programada, moviendo el timón mediante motores eléctricos lineales, bombas hidráulicas o accionamientos rotativos. La adopción fue gradual: primero en grandes yates de crucero y regata de alta gama y, conforme bajaban los costes y se miniaturizaban los componentes electrónicos, se extendió a cruceros de serie de eslora media, hasta convertirse en equipamiento casi estándar en yates de crucero modernos
En la mayoría de barcos de recreo actuales no hay un girocompás clásico como el de un mercante o un buque de guerra, sino sensores electrónicos compactos – fluxgate – que hacen, a pequeña escala, el papel de referencia de rumbo y movimiento. Sólo en algunos sistemas de alta gama se usa directamente la señal de un girocompás como fuente de rumbo para el piloto.
En yates y embarcaciones de recreo típicas (veleros y motoras de 7–15 m), el piloto automático toma el rumbo de una brújula fluxgate con compensación giroscópica (rate‑compensated fluxgate), o de sensores inerciales de estado sólido de 6–9 ejes (acelerómetros y giróscopos, ambos sensores comunes en los actuales teléfonos móviles, para detectar movimiento, orientación y rotación. El acelerómetro mide aceleración lineal y la gravedad, mientras que el giroscopio mide velocidad angular), que integran datos de rumbo, cabeceo y balance. En barcos de mayor porte superyates, megayates y barcos profesionales, el piloto puede aceptar como entrada un girocompás verdadero del buque, un compás GPS (antena doble o triple que da rumbo verdadero), o un sensor de rumbo integrado.
Componentes de un piloto automático moderno de recreo
El piloto automático moderno de un barco de recreo no depende de un girocompás grande, sino de una constelación de sensores electrónicos compactos (rumbo, giro, actitud, viento, GPS) conectados a un ordenador de gobierno que calcula la respuesta de timón y la envía a un actuador eléctrico o hidráulico. Los fabricantes varían, pero el esquema básico se repite en todas las marcas
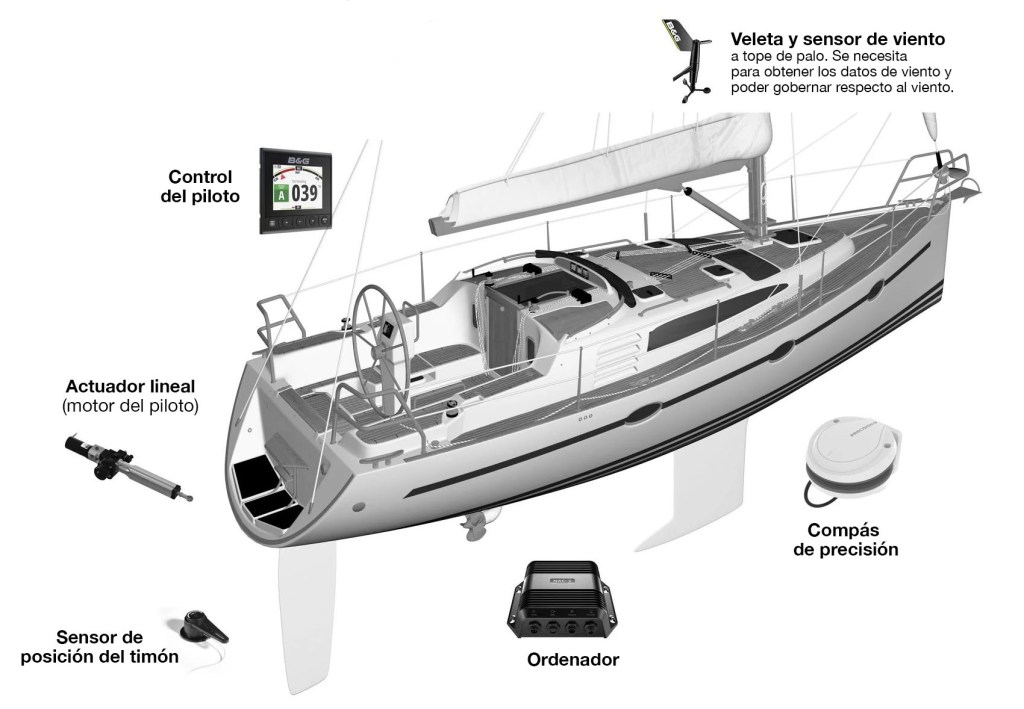
Unidad de control o “control head” consistente en una pantalla con teclas o rueda para: accionar o quitar el piloto, ajustar rumbo y modos (Auto, Nav, seguir ruta, ángulo de viento, etc.). Puede haber mandos remotos o control desde el plotter mediante NMEA2000/SeaTalkNG, etc.
Ordenador de piloto / unidad central (ACU, Course Computer) recibe los datos de rumbo, viento, velocidad, GPS, ángulo de timón, etc., y calcula constantemente qué mando dar al actuador para mantener el rumbo o la ruta. Implementa los algoritmos de control (PID u otros), aprende el comportamiento del barco y ajusta la agresividad del timón.
Sensor de rumbo Suele ser un módulo compacto que combina Brújula fluxgate o magnética de estado sólido, giróscopos de velocidad para medir rapidez de giro en guiñada, y a veces en cabeceo y balance y acelerómetros para conocer la escora, el balanceo y el cabeco para poder filtrar mejor el ruido de mar. En sistemas modernos se habla de: Rate‑compensated fluxgate (brújula fluxgate compensada por velocidad angular) para compensar errores por escora y movimientos rápidos; sensor de 9 ejes, brújula, 3 giróscopos y 3 acelerómetros que dan un modelo completo del movimiento del barco.
Sensor de ángulo de timón (rudder) un potenciómetro o sensor magnético que da al piloto la posición real del timón; muy importante para barcos pesados o con grandes timones, porque evita que el sistema “busque” sin saber dónde está la pala. En sistemas pequeños, algunos fabricantes ofrecen un virtual rudder feedback: el ordenador estima la posición del timón a partir del tiempo y el consumo del actuador, y se prescinde de sensor físico.
Actuador de gobierno (lo que mueve el timón) Dependiendo del tipo de barco pueden ser brazos lineales eléctricos ( piloto de caña o lineal sobre la caña o el sector del timón) en muchos veleros de crucero.; motores rotativos eléctricos acoplados a la cadena o cable de la rueda.; Bombas hidráulicas (tipo 0, 1, 2…) conectadas a un sistema de dirección hidráulica en motoras y veleros grandes. El actuador recibe órdenes de la unidad central (mete 5 a babor”, quita timón) y mueve físicamente el timón con la fuerza necesaria.
Sensores adicionales integrados (no son imprescindibles, pero muy habituales) GPS / plotter: para modos “Nav” o “No‑Drift”, donde el piloto sigue un waypoint o una ruta compensando viento y corriente.; equipo de viento: en veleros, permiten modos de “ángulo de viento aparente/real” para ceñida o portantes. Registro de velocidad y corredera: para cálculo de viento real y para ajustar la respuesta del piloto según la velocidad del barco.
Notas:
- La precesión es el movimiento lento y circular que hace el eje de un objeto giratorio (como una peonza o un giroscopio) cuando recibe un «empujón» externo, en lugar de caerse directamente. Por ejemplo, cuando una peonza gira su eje quiere quedarse quieto (rigidez), pero si la inclinas ligeramente, el eje no cae hacia abajo, sino que empieza a dar vueltas en círculo alrededor de un punto vertical, como un perro persiguiendo su cola. Eso es la precesión, causada por la conservación del momento angular. En un girocompás de barco, la rotación de la Tierra actúa como ese «empujón». El eje del giroscopio precesa hasta alinearse con el eje terrestre, apuntando al norte verdadero en 1-2 horas, sin caerse pese al cabeceo o balanceo del barco ↩︎
- El momento angular es una propiedad física que describe la rotación de un objeto alrededor de un eje. Al igual que el momento lineal describe el movimiento de traslación, el momento angular describe el movimiento de rotación ↩︎
- El torque, o momento de torsión, es la fuerza capaz de generar una rotación en un objeto alrededor de un eje, como la fuerza que se aplica al pedal de una bicicleta para moverla o la que hace girar el cigüeñal de un motor. Se mide en unidades como Newton-metro y es crucial en vehículos para la capacidad de arrancar, acelerar o mover cargas pesadas, diferenciándose de los caballos de fuerza (potencia) en que el torque es fuerza de giro, no velocidad ↩︎
- Fluxgate es el nombre de un tipo de sensor magnético y de la brújula electrónica que lo utiliza.
Un sensor fluxgate es un magnetómetro muy sensible que mide intensidad y dirección de un campo magnético (por ejemplo, el terrestre) usando un núcleo ferromagnético que se lleva periódicamente a saturación mediante corriente alterna. El término procede de la combinación de las palabras inglesas “flux” (flujo magnético) y “gate” (puerta): el circuito “abre y cierra” el paso del flujo magnético en el núcleo y detecta cómo se modifica cuando está presente el campo externo. Aplicación náutica una brújula fluxgate utiliza dos o más bobinas enrolladas sobre un núcleo de material magnético de alta permeabilidad; midiendo las señales inducidas puede determinar la dirección de la componente horizontal del campo magnético de la Tierra, y por tanto el rumbo magnético.
La gran ventaja frente a la brújula de rosa y aguja es que la salida ya es una señal electrónica que se puede digitalizar, enviar por NMEA, alimentar un piloto automático, un radar MARPA/ARPA o un plotter sin partes móviles visibles.
↩︎
Para saber más:
History of gyroscopes
https://aertecsolutions.com/
https://www.ebsco.com/
https://noaateacheratsea.blog/
https://siebertyachtmanagement.com/
https://es.wikipedia.org/
https://panbo.com/
https://archive.seattletimes.com/
https://www.kimerius.com/
https://www.anschuetz.com/
https://www.sperrymarine.com/
https://www.marinelink.com/
https://www.mastermariners.org.au/
https://fi.edu/en/
https://www.lindahall.org/
https://thecompasshistory.com/
https://www.britannica.com/

Deja un comentario